
Figure 1: The horse standing, as it appears when the program starts up.
This project demonstrates an animated robot horse running around a little outdoor field.
All credit for the horse model goes to Ethan Nakashima from ART 384.
The ground has been mapped to a texture. There is a blue skybox and directional lighting to simulate an outdoor world. The fence is a separate model made from cubes scaled differently and translated.
The grass texture is a free texture available online.
The horse is constructed from an 18 piece hierarchical model. The pieces include: the head, the neck, the body, the tail, two front upper legs, two front lower legs, two back hips, two back upper legs, two back lower legs, and four hooves.
I used the model stack helper given to us in our previous hierarchical model lab. I also used the base obj code offered on PolyLearn to write my own obj parser.
The program loads with a robot horse in the middle of a fenced in field.
Figure 1: The horse standing, as it appears when the program starts up.
The horse can be rotated with the 'j' and 'l' keys. 'j' turns the horse to the left. 'l' turns the horse to the right.
Figure 2: The horse rotated.
Pressing the 'i' key starts the horse running forwards. Its legs have a scripted running animation. The ten leg pieces all rotate differently based on the script.
Figure 3: The horse's legs moving.
The user can move the horse all around the field while it is running.

Figure 4: The horse moving around the field.
Figure 5: The horse moving around the field.
The user cannot move the horse past the fence. The camera can be moved forward and back with the 'w' and 's' keys. The camera can also strafe with the 'a' and 'd' keys. Clicking and dragging the mouse on the screen rotates the camera.
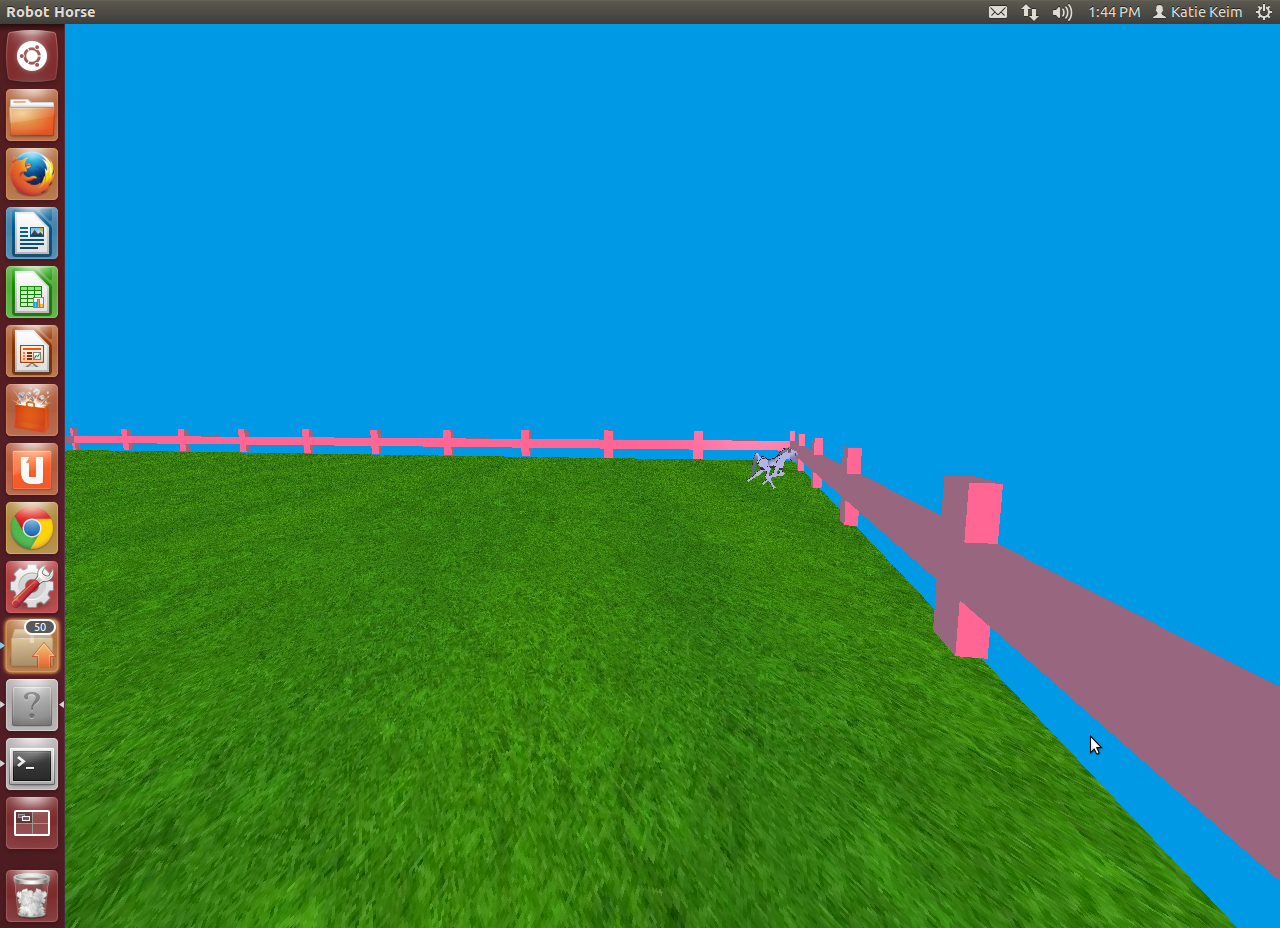
Figure 6: The horse trying to move past the fence.
The horse can also be stopped again with the 'k' key. Its legs should return to the standing position.
Figure 7: The horse stopped.
You can access the Robot Horse program code here.