This project is designed to demonstraint some of the skills we have learned while taking CSC-471 at Calpoly.
In this project the main character is a Hierarchicaly modeled robot which tries to get to the "Crown." When the robot collides with an obsticle, it turn toward the other direction which reduces its distance toward the Crown. After reaching the "Crown", the crown shrinks until it is gone from the screen. After reaching the Crown, the robot celebrates the occasion by jumping up and down.
The program is capable of detecting collisions between the robot and the trees that are spread accross the screen. When the collision is detected, the robot turn 90 degrees and continue browsing the enviroment.
Additionally, when it reaches the goal that is placed in the enviroment, it stops moving any further.
Basic lighting of the enviroment is done based on the principals of Phong shading.
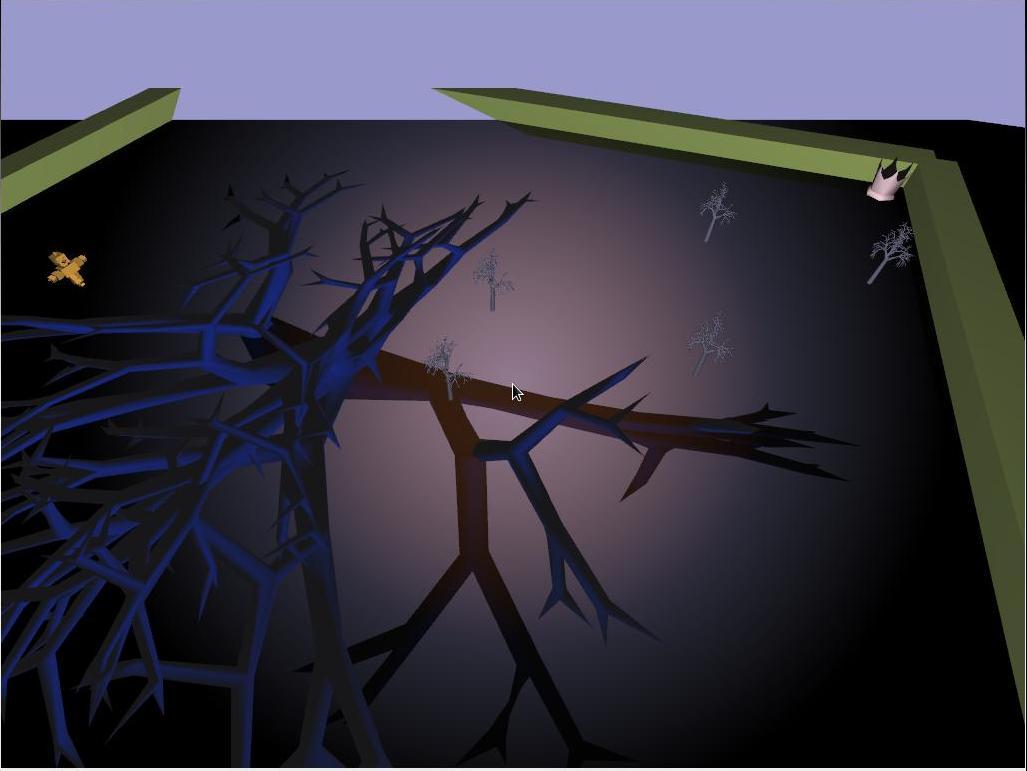
The light source moves along side with the camera which simulates having a flashlight in the viewers hand. This effect makes the center of the screen to look brighter than the edges of the screen.This functionallity is used to enable the user to rotate the camera in the enviroment useing the mouse
After the robot reached the goal, it strats jumping up and down while staying in the same location. In order to have a realistic jumping motion, it uses V^2 - U^2 = 2at and y = 1/2 * at^2 + Vt + y(initial). This gives the robat a smooth jumping effect. The robot starts moving fast upwards while its speed slows down gradually until it reaches the higest point. Then, it starts falling down with very low speed. The falling down speed increases based on the time it passed from free falling.
Robot, the main character of the project, is build up of 12 different parts which all of them had to be assembled to form the robot.
Robot has a weak Artificial Intelligence which guids it toward the goal. It only allows the robot to go toward the goal. If robot enters a U-shape obsticle, it would not be able to get out of it and find the goal.