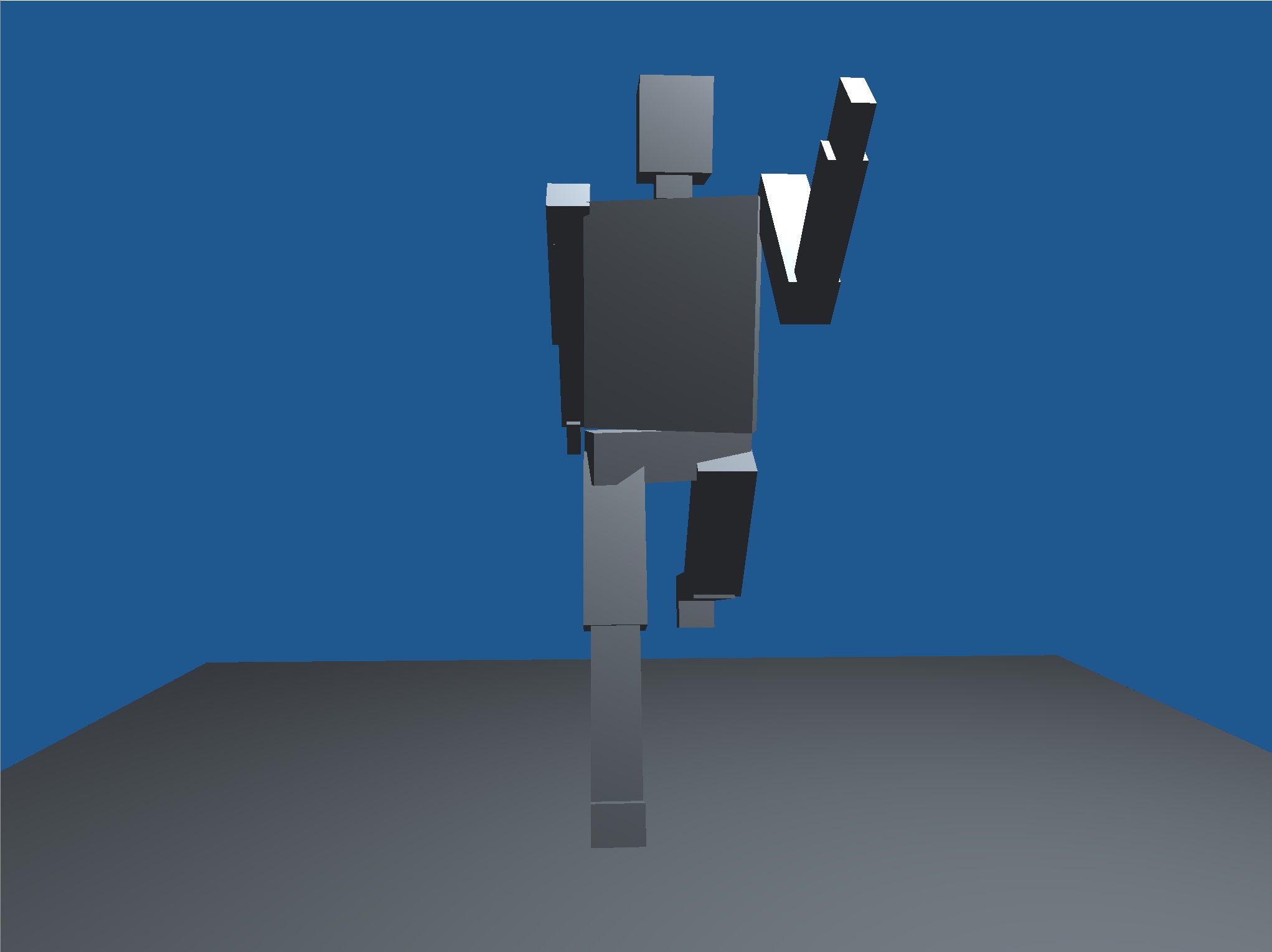
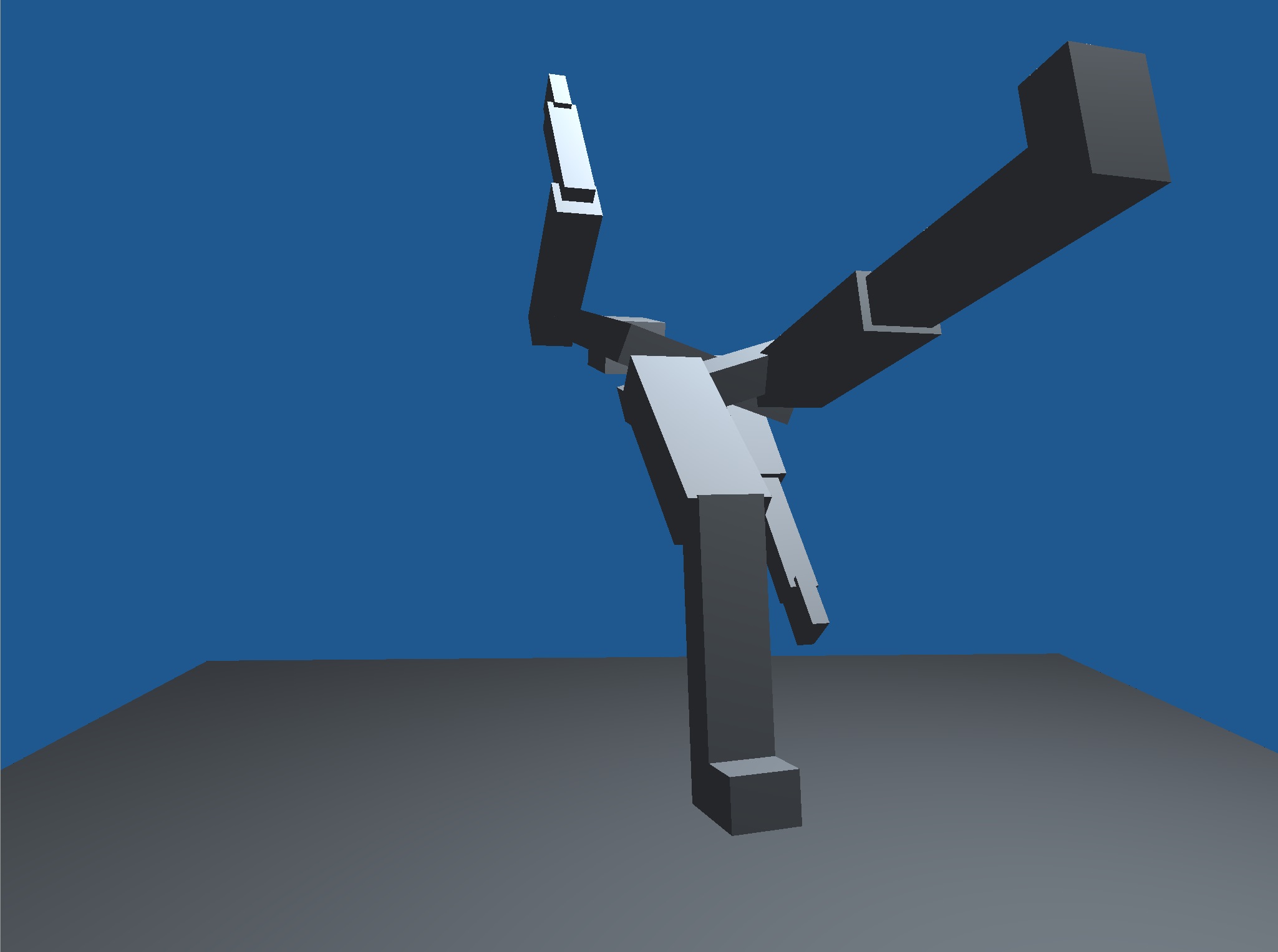
For this project, I created a hierarchical model of a humanoid figure that walks.
The figure is built using basic cubes that have been transformed in a matrix stack.
It has a simple walk cycle in which it turns its torso and hips and swings its arms while it walks.

The technologies and techniqued implemented in this project are:
While a lot of the project was about building the hierarchical model, the most thought provoking component was about animating the model. The main problem was thinking about how the human body moves and to mimic that fluid motion. Rather than looking up walk cycles online, I spent a lot of time walking in circles and thinking about how each body part moved. In order to create a repeated motion, the walk cycle uses a verson of sin(x) for each body part.
Base code was CPE 471 Lab 6 by Zoe Wood.