For my final project I decided to experiment with visual elements that would catch the user's attention. The primary goal was to implement a dummy model that the user would be able to control the movement of, while the user explores the environment. I implemented the user dummy as an Hierarchical model with an animated walking cycle.
In addition, I implemented
The idea of this project was to have the user explore a corridor or hallway that has many forks in it. As the user chooses which forks to go down, there would be a collider that would detect which end the user decides and output it to a log. When the user chooses one of the forks via walking down the corridor to it, the other option would be closed off. This would limit the user to only being able to explore their choice and the remaining forks and corridors in the environment.
The first hurdle when implementing the walking cycle for the dummy is making sure the different parts of the dummy is rotated properly. To sum up my process, I did the following steps:

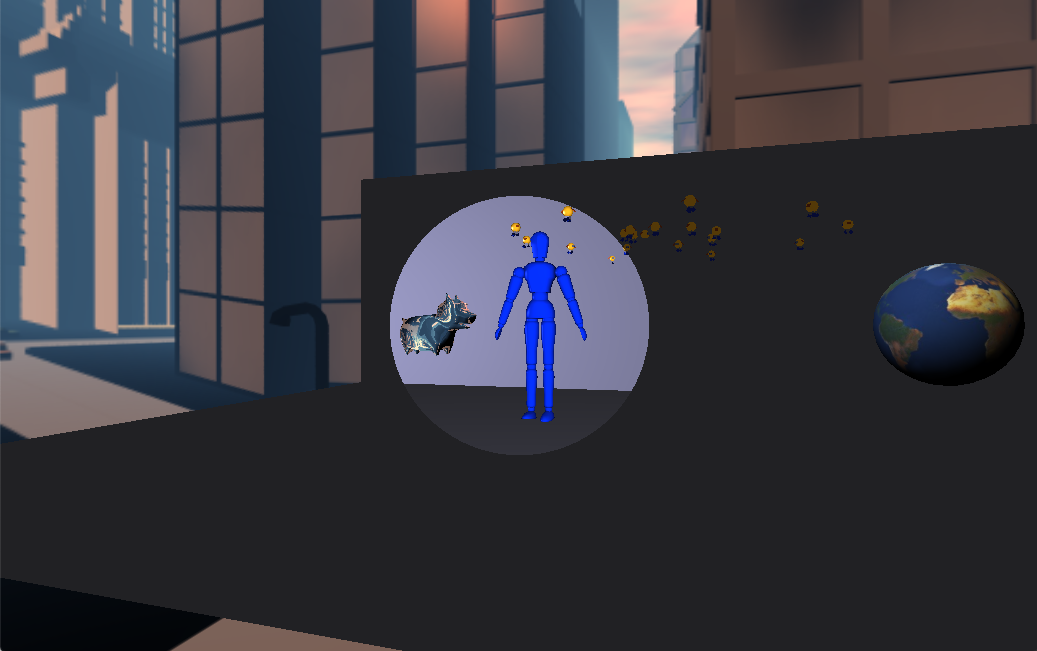
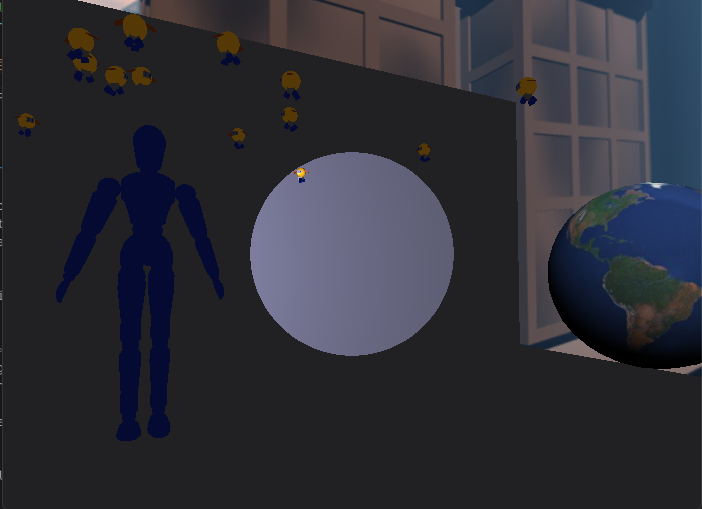
Another hierarchical model that I implemented in my program is a creature with a simple ear animation. I arranged it to spin in a circular spiral above everything else in the scene. This spiral animation is one of the motion components that I planned to include in my final scene. The idea was to have this motion seen down one end of a fork, while a simpler linear motion would be made at the end of the other side of the fork.
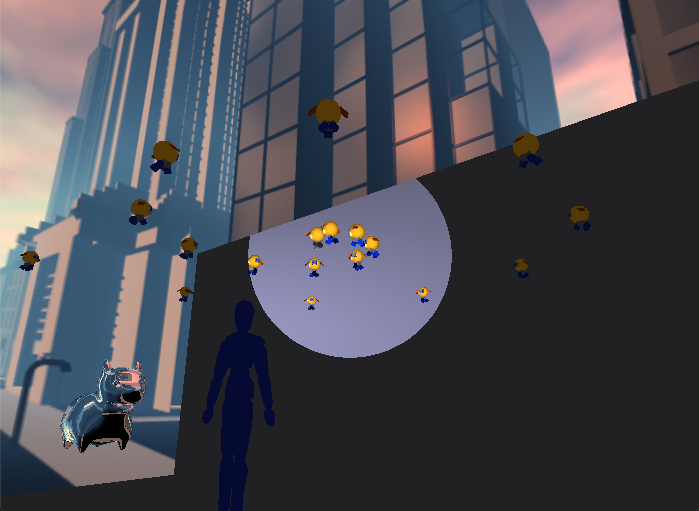
The spotlight was one of the easier parts of the project that I implemented. Everything inside the spotlight's circle is rendered with Blinn-Phong shading while everything outside of the circle is rendered with ambient lighting.
Here is a video demonstration of my project. Simple images is not sufficient enough to demonstrate the walking animation and the spiral animation of the flying creatures.
I really enjoyed working on this project. Even though making the walk animation work for the dummy took a large amount of time, I enjoyed the process. I did not manage to implement everything that I have planned to,but I am satisfied with what I managed to complete.
Here are the resources I used:
Here is the 3D collision I tried to implement: 3D Collision.