For the final project, I created a virtual world with articulated creatures interacting with the environment. Here are the highlights of my self-sufficient world.
Overview of the Virtual World
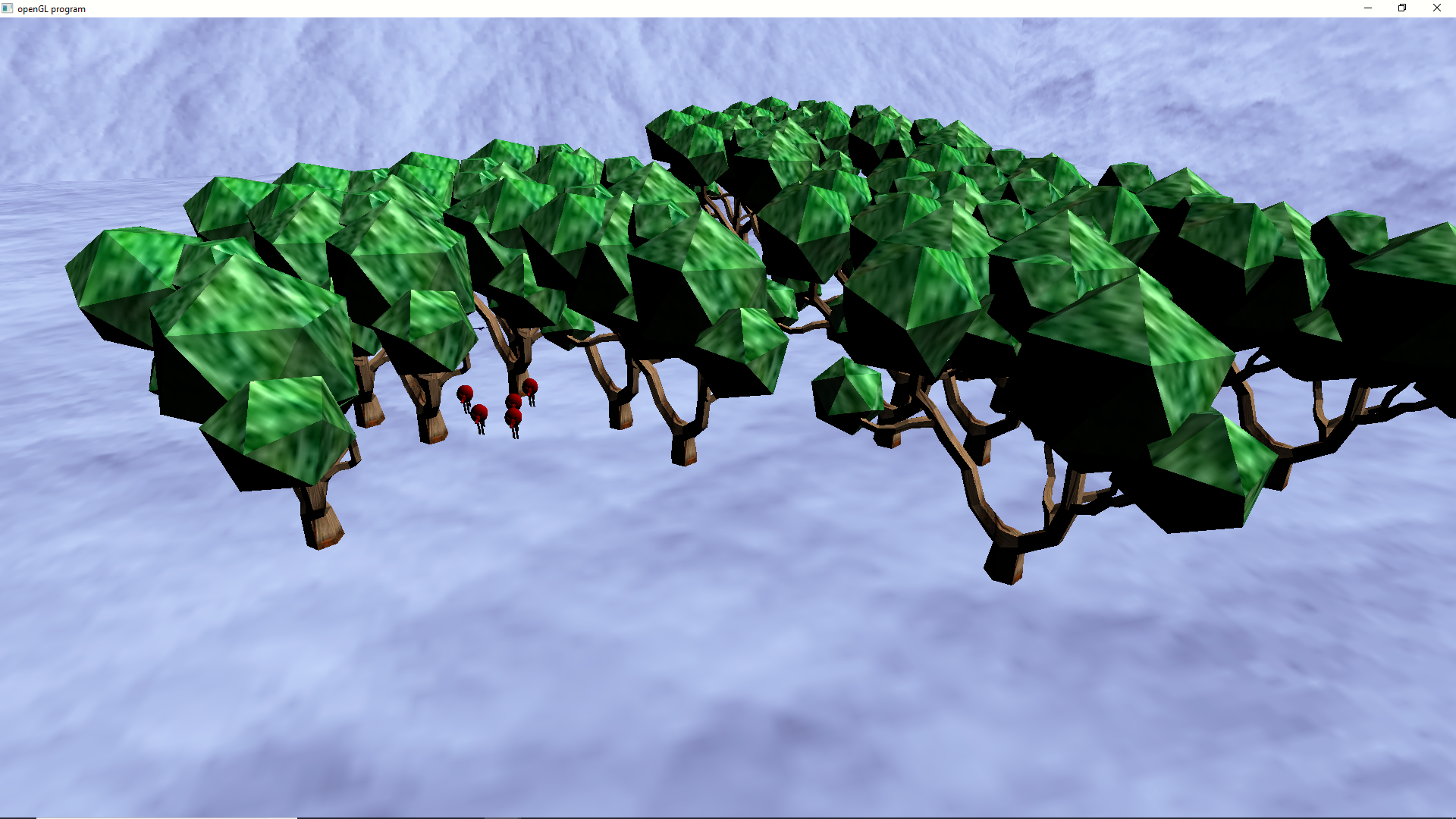
The virtual world is built inside of a skybox.
There are pitch and yaw rotation, strafe left and right, and forward and backward movement added to the view camera controlling by mouse movement.
|
Hierarchical Modeling
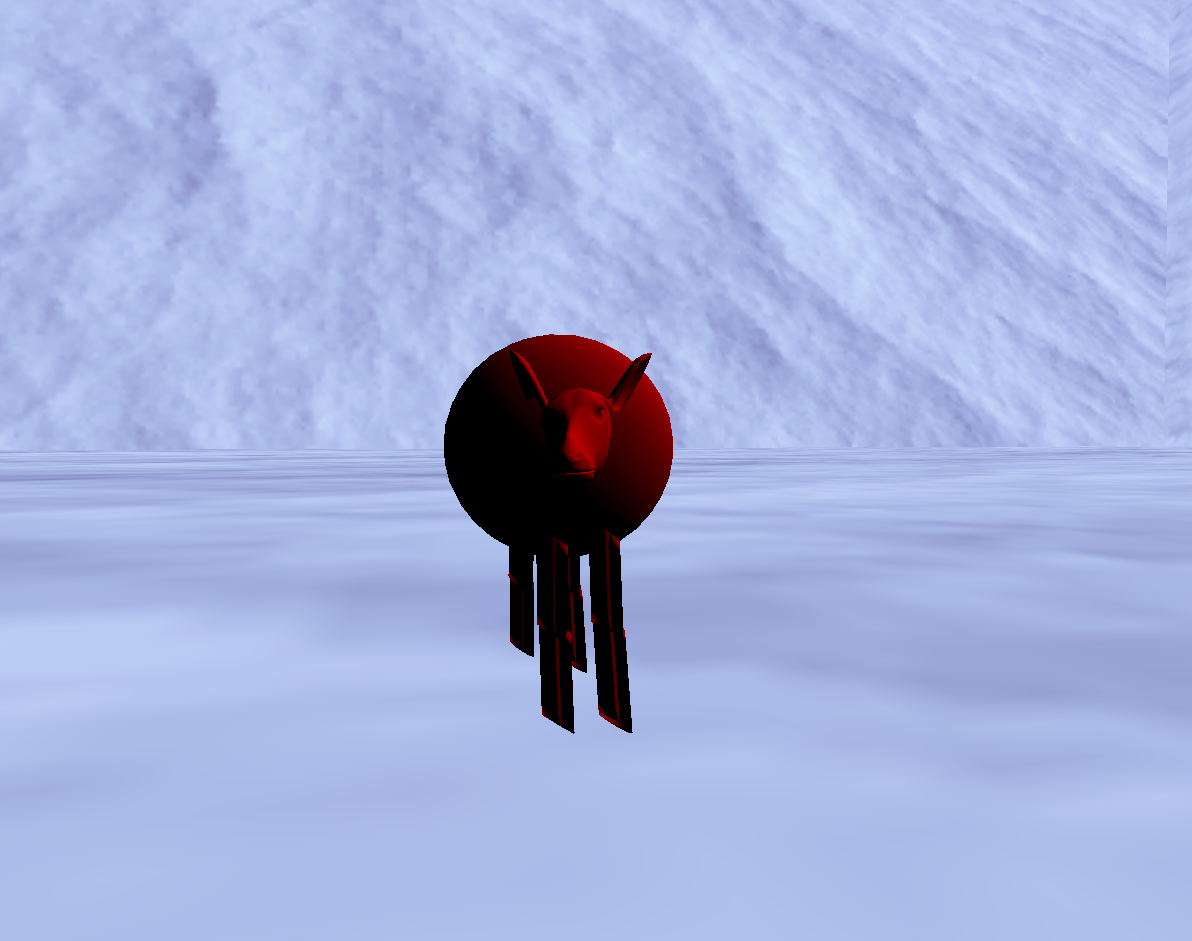
The cows in my world are built using hierarchical modeling with both meshes and primitives. The head of the cow is a mesh for a deer. The body is stretched sphere. Each leg is formed by two cylinders as the upper and lower part of a leg.

|
|
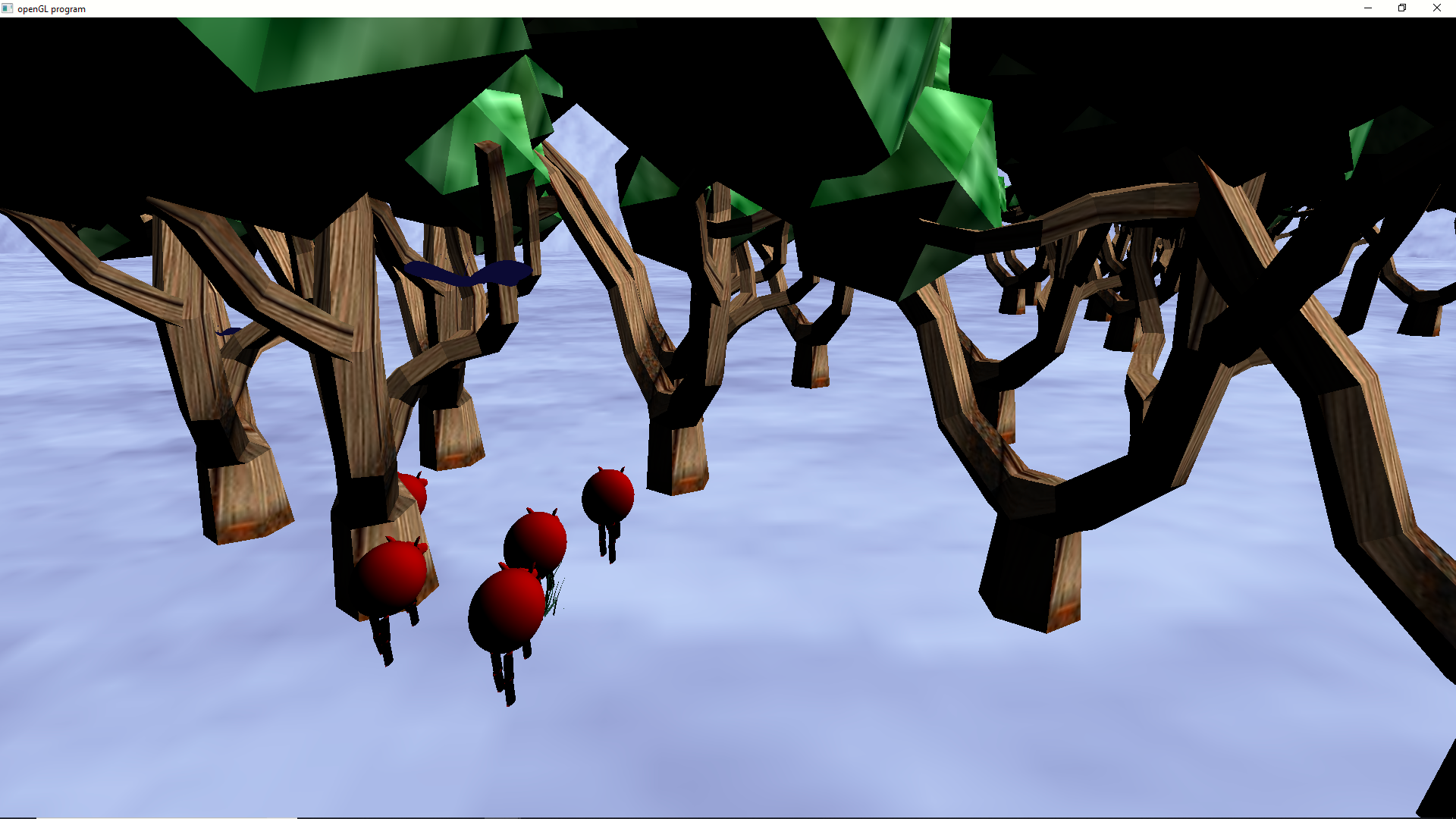
Texture Mapped Objects
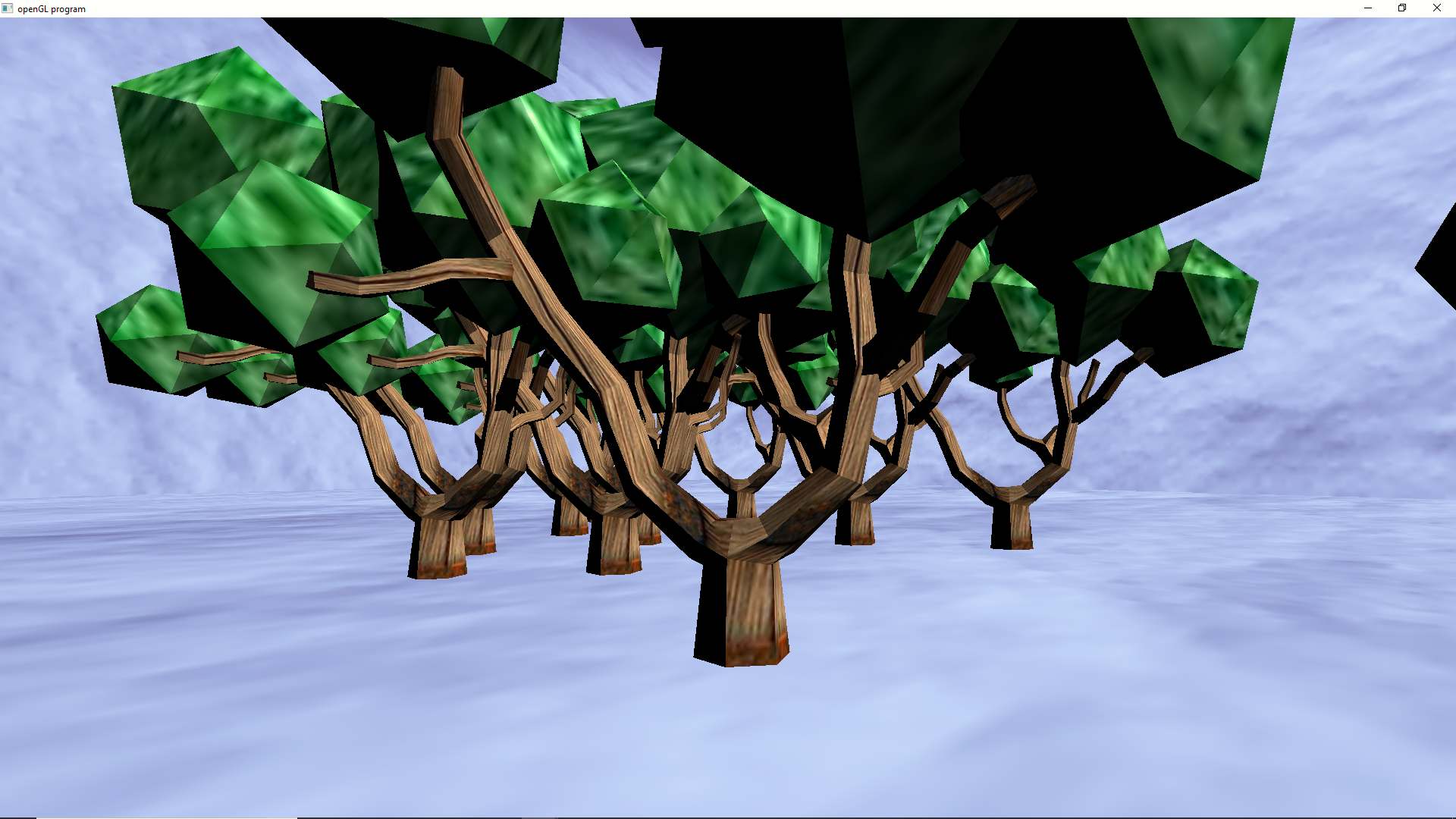
Trees are mapped with texture in order to add more details for the surface.
|
Interactions
The cow will poop every 5 seconds from its current butt position. The poop will then fall following a projectile path to the ground at 45 degrees angle.
As it hits the ground, grass grows out of the location where the poop lands.

|

|
Pathing
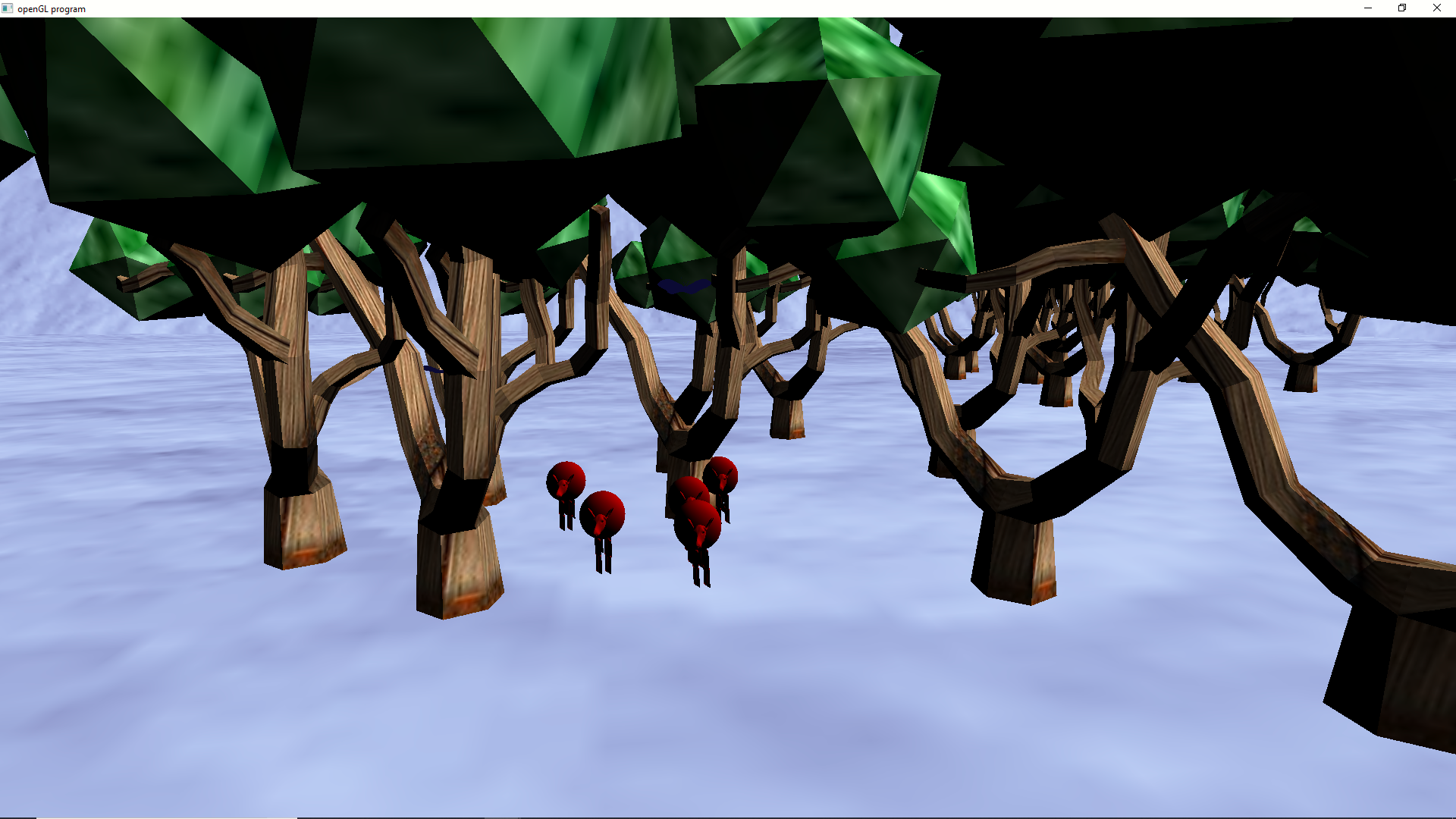
Cows are walking around in a square path and make turns at the corner of the square.
Butterflies are flying around the trees in a circle path and flutuate up and down so that it looks more realistic.

|
|

|
|
Lights
I have a directional light in the world using Phong shading.