Spencer Woodworth - Tangent Space Normal Mapping of Cisterns From Stereo Images
Data Collection
First we captured stereo data using the GoPro Hero 3D system.

Some examples of left and right images are below.

|

|
Disparity Calculation
Then we built a disparity map using MatLab. The results of the left and right image shown above:
Normal Map Creation
Next we build a normal map from the disparity image by comparing neighboring pixels and shifting the normal accordingly.

Disparity Map Output From MatLab |
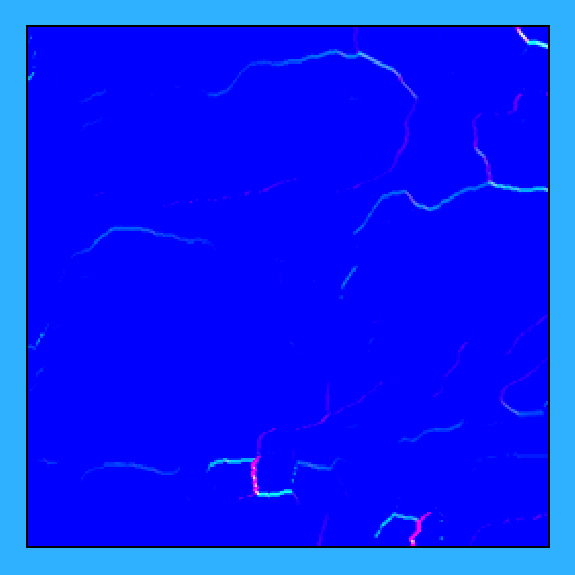
Normal Map Displayed As RGB Values |
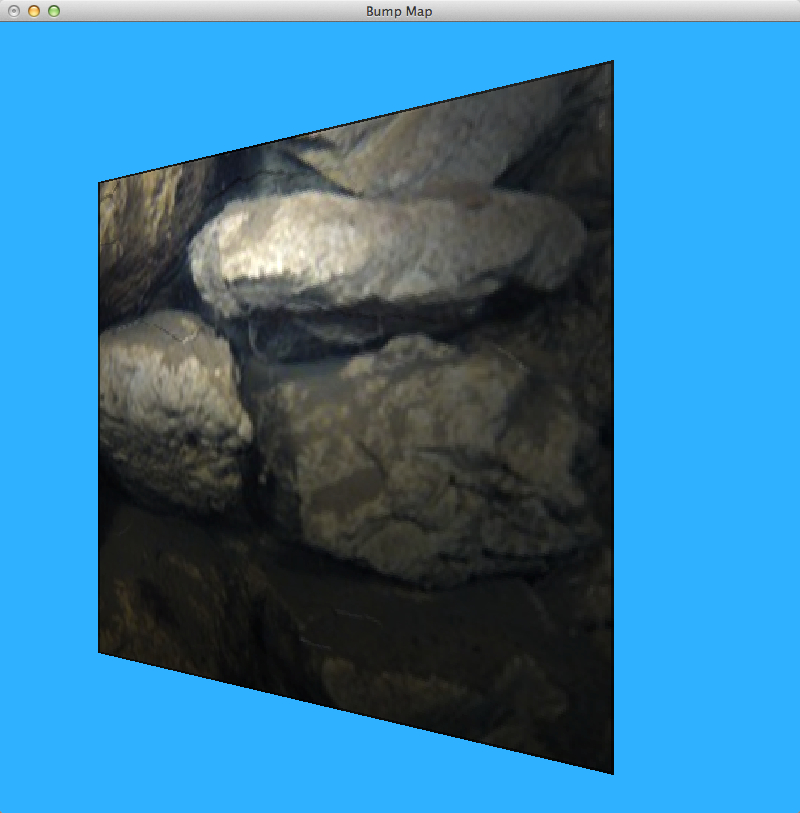
I then recalculate phong shading using using these new normals.
Phong Shading Using Normal Map
Then the original texture image is added.
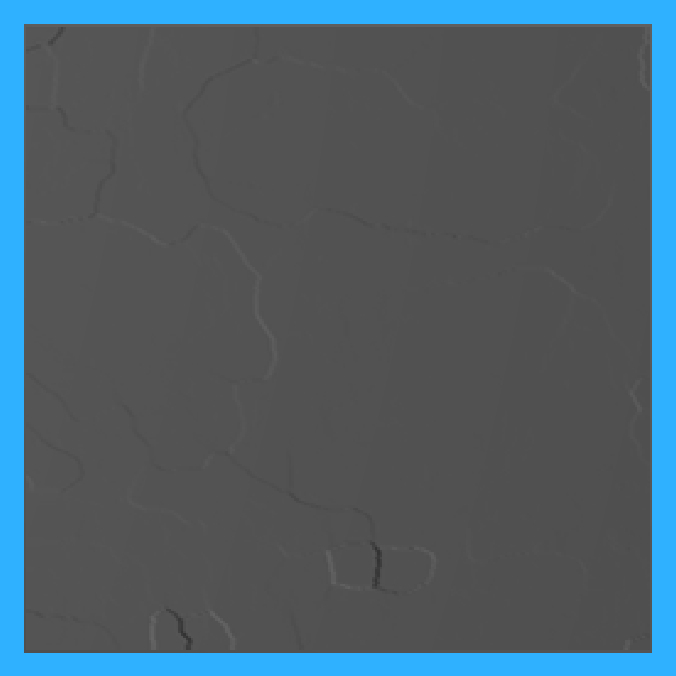
Normals Transformed Into Tangent Space
Finally, I transform the normals into tangent space. For this demo I have hardcoded the TBN matrices. I have removed the texture to make the results more noticeable.
Future Work