
Mapping Techniques
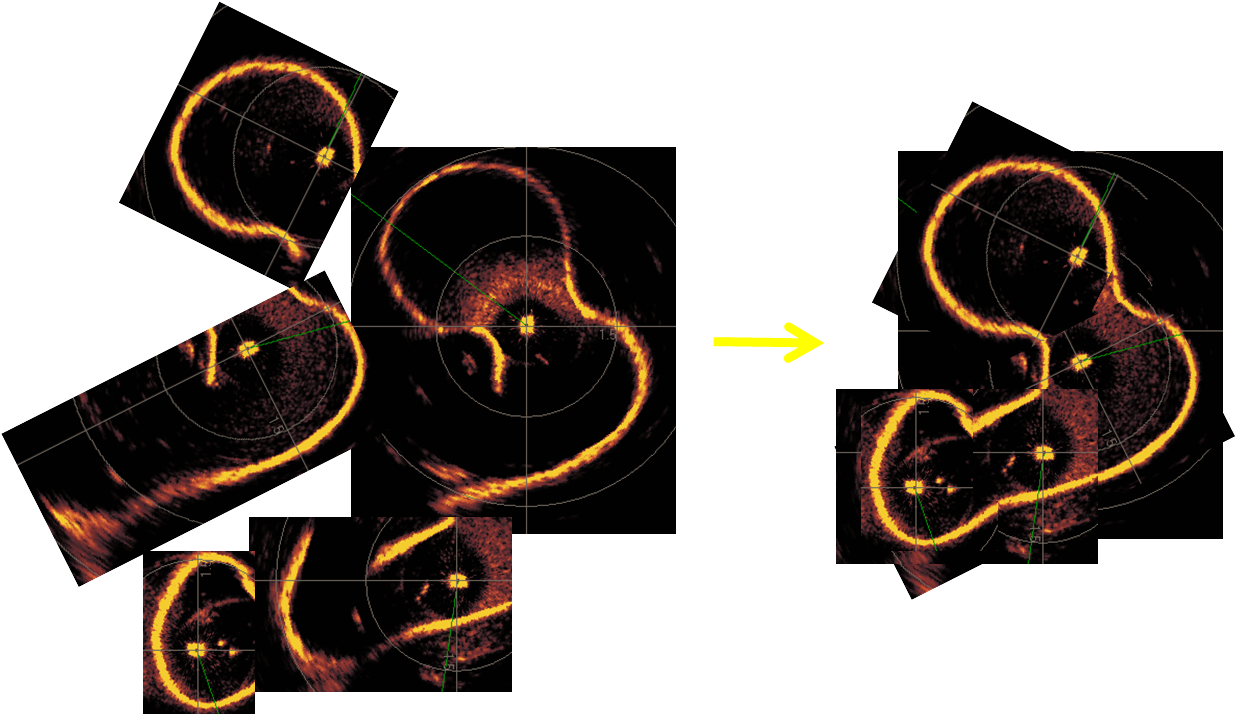
During the 2008 expedition, the sonar data was used in several ways to both construct a 2D map of the cistern, and localize the robot within this map. The first method was to mosaic several sonar scans into a combined map. To accomplish this, the robot was driven to several locations in the cistern, where a full 360 degree sonar scan was obtained. At each location, the robot was landed on the bottom to ensure it was static throughout the scan. Despite a large number of reflections from the bottom, the scans were generally sharp and easy to mosaic. Shown below are sample images of site 8 used to create the mosaic
Also tested, was the ability to map on the fly. A version of "FAST SLAM" (Thrun et. al. 2005) was implemented to allow the mapping to occur in real time. This algorithm represents the robot and cistern with many particles (i.e. state estimates of the robot's location and map), each which is updated for every sensor measurement. Specifically, each time a sonar measurement is recieved, the robot first predicts where a particle moved since the last measurement using memory of the control inputs sent to the robot and dynamic model of the robot. Second, the "weight" or likelihood that the particle correctly represents the actual state of the robot and map is calculated. Once all weights of all particles have been calculated, the particle set is regenerated by randomly selecting particles from the previous set, giving higher probability of sampling to those particles with higher weights.
Two issues were addressed to obtain good performance with this algorithm. The first was a sufficient number of particles. Clearly, increasing the number of particles limited the real-time capabilities. The second issue was that the implementation required a good model of the the tether and obstructions that limit the robot's motion, despite it being sent control signals to move. Such a model was developed. A short video of offline SLAM can be found here.
On the 2009 expedtion, the KCF smart tether was also incorporated into the correction step of the algorithm. It produced ROV position estimates to better weight the particles.
Once constructed, such maps can be used to localize the robots with Particle Filter localization.
To note, technical details from mapping during the 2008 expedition can be found in the following paper published in the 2008 ICARCV conference proceedings.
California Polytechnic State University
University of Malta